Pompežev kot
Ker stvari občasno zapišem


Ker stvari občasno zapišem
Telesu, ki ga omejuje ploskev \[\sqrt{x} + \sqrt{y} + \sqrt{z} = 1,\] določi maso ter vztrajnostni moment: (a) če je gostota konstantna, (b) če se gostota spreminja z razdaljo od središča kot \(\rho = r^p\), kjer je \(r\) razdalja od središča telesa. Kakšen učinek ima vrednost parametra \(p\)? Oceni natančnost rezultatov. Opazuješ lahko tudi obnašanje ostalih momentov (težišče, povprečja sferičnih harmonikov).
V krogli se rojevajo žarki gama. Njihova povprečna prosta pot v snovi, iz katere je krogla, je enaka radiju krogle. Kolikšen delež fotonov uide iz krogle? Kako se verjetnost pobega spreminja z razmerjem povprečne proste poti in radija krogle?
Model nevtronskega reflektorja: tok nevtronov vpada pravokotno na ploščo, v kateri se nevtroni sipljejo in nič ne absorbirajo, pri čemer je njihova prosta pot enaka polovici debeline plošče. V poenostavljenem modelu privzamemo, da se sipljejo samo naprej in nazaj, in to z enako verjetnostjo. Kakšna je porazdelitev po številu sipanj? Kolikšna je prepustnost reflektorja? Oceni natančnost. Nekoliko bolj realen je model z izotropnim sipanjem. Z njim preveri, koliko so rezultati poenostavljenega modela uporabni. Razišči še kotno porazdelitev odbitih in prepuščenih nevtronov ter odvisnost prepustnosti od debeline plošče v modelu z izotropnim sipanjem
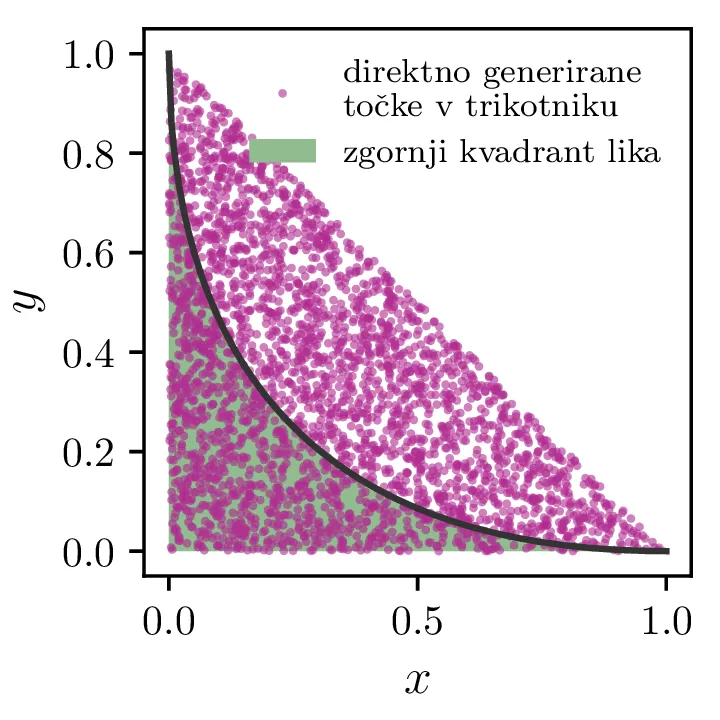
Še pred volumnom 3-dimenzijskega telesa si bomo pogledali še nekoliko preprostejši primer telesa opisanega kot \[\sqrt{|x|} + \sqrt{|y|} < 1.\] To telo je pravzaprav 2-dimenzijski presek telesa, ki ga bomo gledali v nadaljevanju. Površina takega lika je izražen kot integral \[S = \int_0^1 \left( 1 - \sqrt{x} \right)^2 \,\mathrm{d}x = \frac{1}{6}.\]
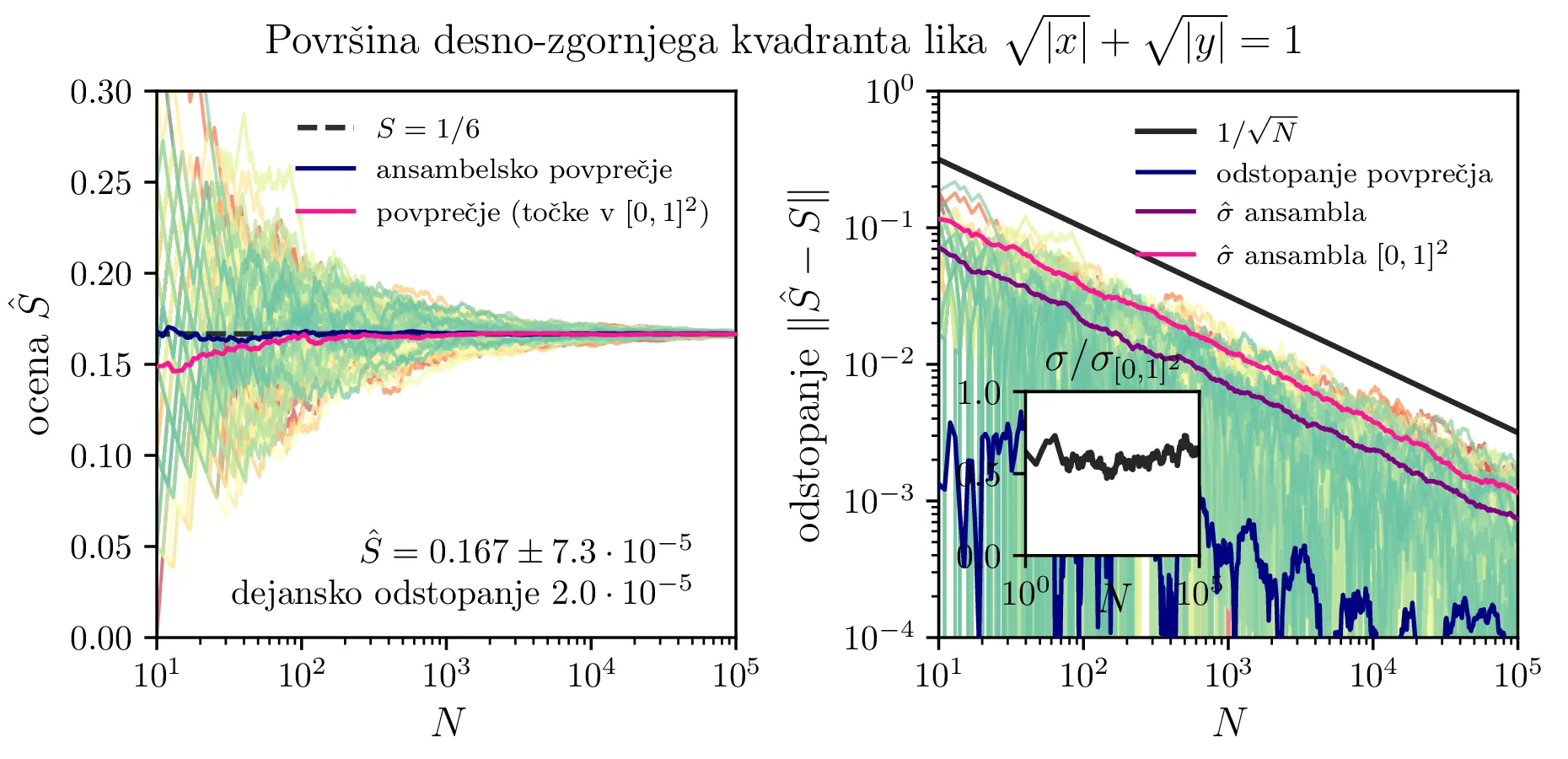
Ker je zgornji desni kvadrant lika \(\sqrt{|x|} + \sqrt{|y|} \le 1\) povsem vsebovan v trikotniku \((0, 0), (1, 0), (0, 1)\), lahko to izkoristimo in prihranimo \(1/2\) poskusov tako da direktno generiramo točke znotraj tega trikotnika. To storimo tako, da uporabimo baricentrične kordinate in generiramo števila \[\alpha \sim U(0, 1), \qquad \beta \sim U(0, 1),\] nato pa enakomerno porazdeljene točke znotraj trikotnika \((0, 0), (1, 0), (0, 1)\) dobimo kot \[\begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} \alpha & (\beta - \alpha) & 1 - \beta \end{bmatrix} \begin{bmatrix} 0 & 0 \\ 1 & 0 \\ 0 & 1 \end{bmatrix}\] Primer takega vzorčenja vidimo na sliki 1 desno.
Za površino lika \(\sqrt{|x|} + \sqrt{|y|} < 1\), v nadaljevanju pa tudi za volumen telesa \(\sqrt{|x|} + \sqrt{|y|} + \sqrt{|z|} < 1\), lahko izračunamo eksakten rezultat, ki nam omogoča preprosto vrednotenje napake MC integracije. V dejanskih aplikacijah MC integracije, kjer eksakten rezultat ni na voljo, pa vseeno potrebujemo nek način za oceno napake.
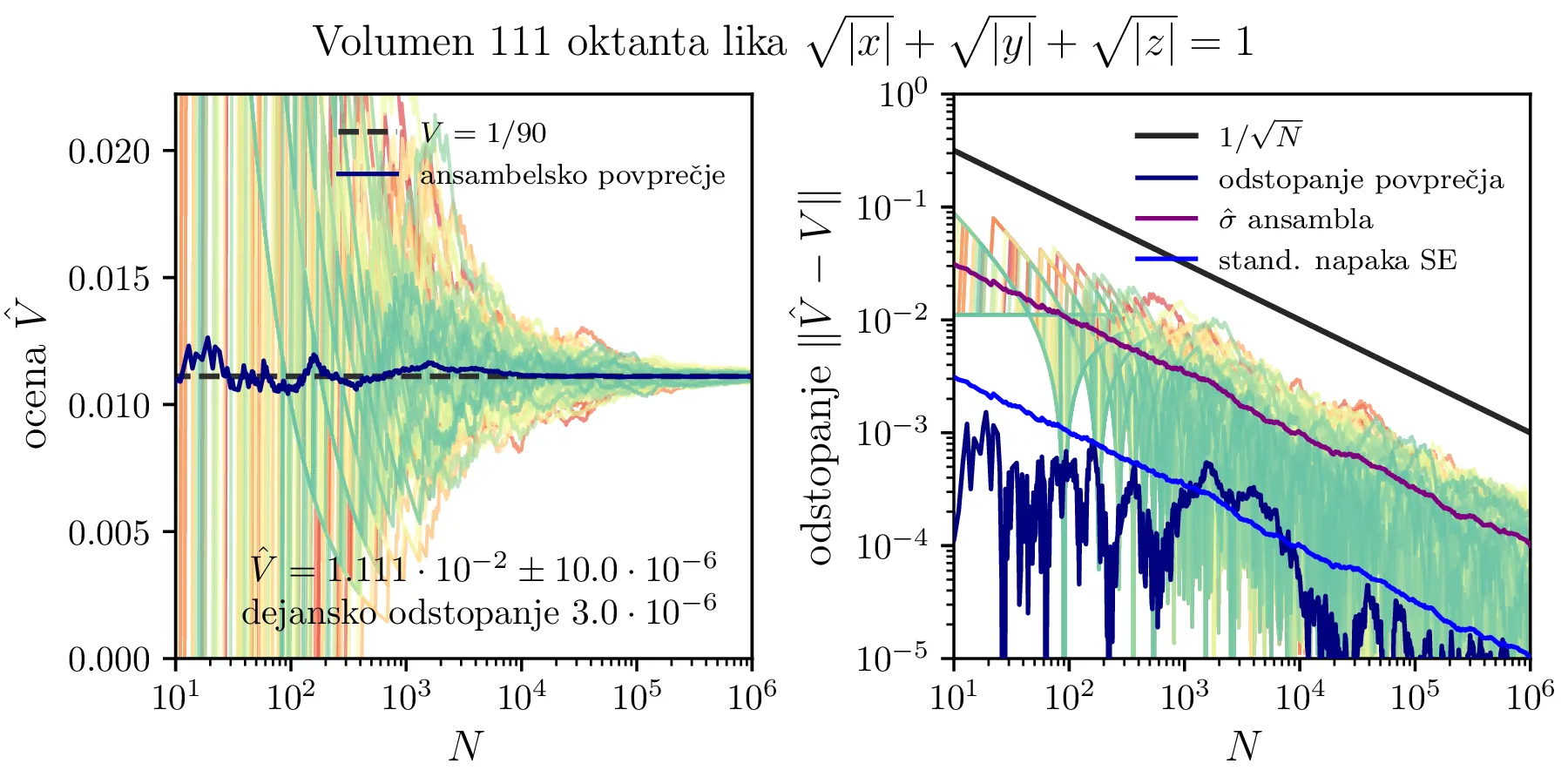
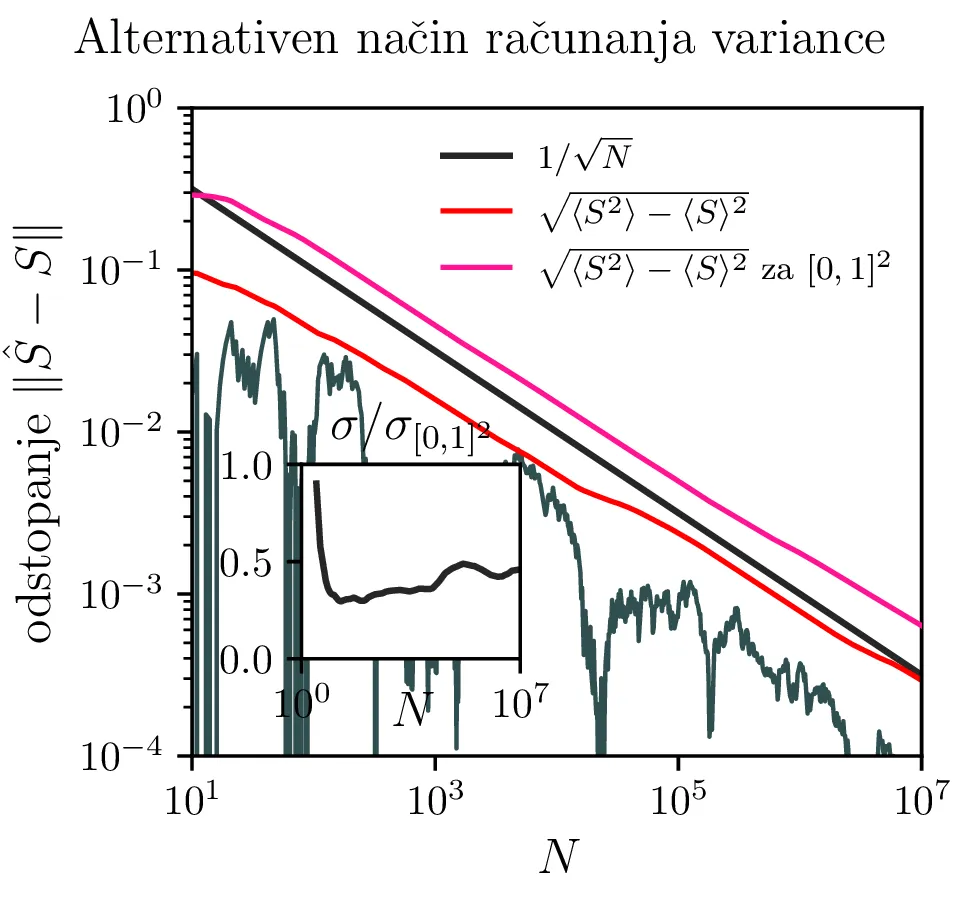
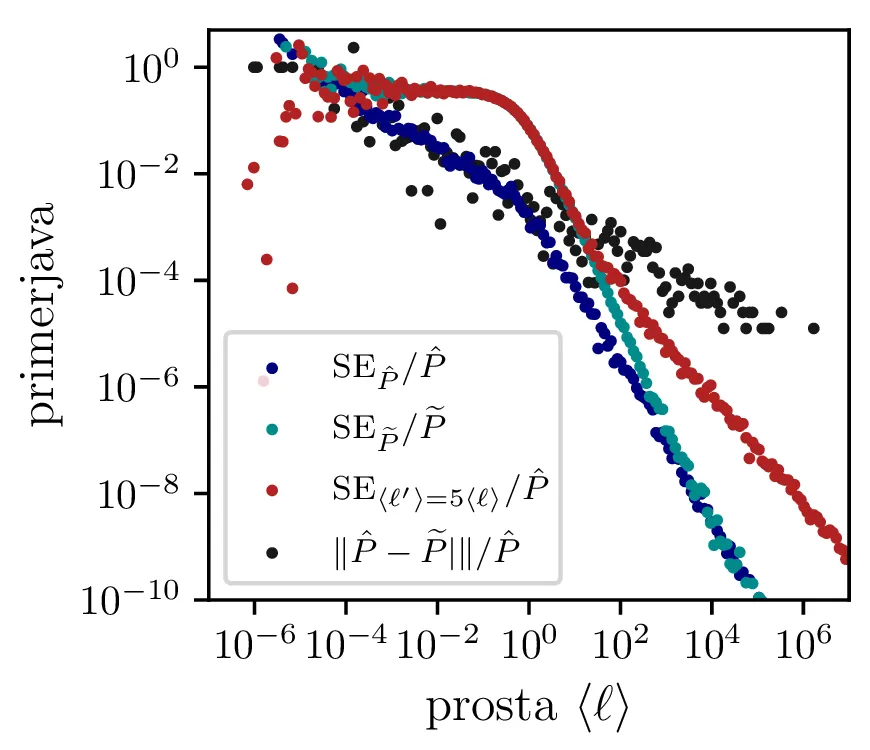
Najbolj intuitiven način za oceno se mi zdi kar standardna napaka ansambla, kjer poženemo ansambel \(M\) integracij, za katere dobimo rezultate \([S_i]_{i=1}^M\), nato pa rezultat z napako podamo kot \begin{equation}S = \langle [S_i]_{i=1}^M \rangle \pm \frac{\hat{\sigma}_{[S_i]_{i=1}^M}}{\sqrt{M}}. \label{eq:format}\end{equation} Takšna napaka je t. i. standardna napaka (ang. standard error ali SE), ki ocenjuje standardno deviacijo vzorčnega povprečja. Na sliki 2 sredinsko npr. vidimo tako oceno \(\hat\sigma\) za ansambel velikosti \(M = 100\), in iz logaritemske skale je razvidno, da po deljenju z \(\sqrt{100}\) to ustreza tudi velikosti napake \(\langle [S_i]_{i=1}^{100} \rangle\) (ta je narisana v temno modri barvi). Alternativa ansambelskemu načinu računanja in oceni napake je znana formula za varianco \[\mathop{\mathrm{Var}}(S) = \langle S^2 \rangle - \langle S \rangle^2.\] Če uporabimo to formulo, lahko napako ocenimo tudi brez ansambla večjih integracij. Iz poskusov (glej sliko 2 desno) sem ugotovil, da je potek takšne napake sicer na izgled bolj gladek, je pa bolj nestabilen od ansambelske SE napake. V nadaljevanju torej uporabljam ansambelsko SE napako in rezultate navajam v obliki (1). Da je napaka \(\mathrm{SE}\) res primerna za oceno napake ansambelskega povprečja, lahko jasno vidimo tudi na sliki 3 desno.
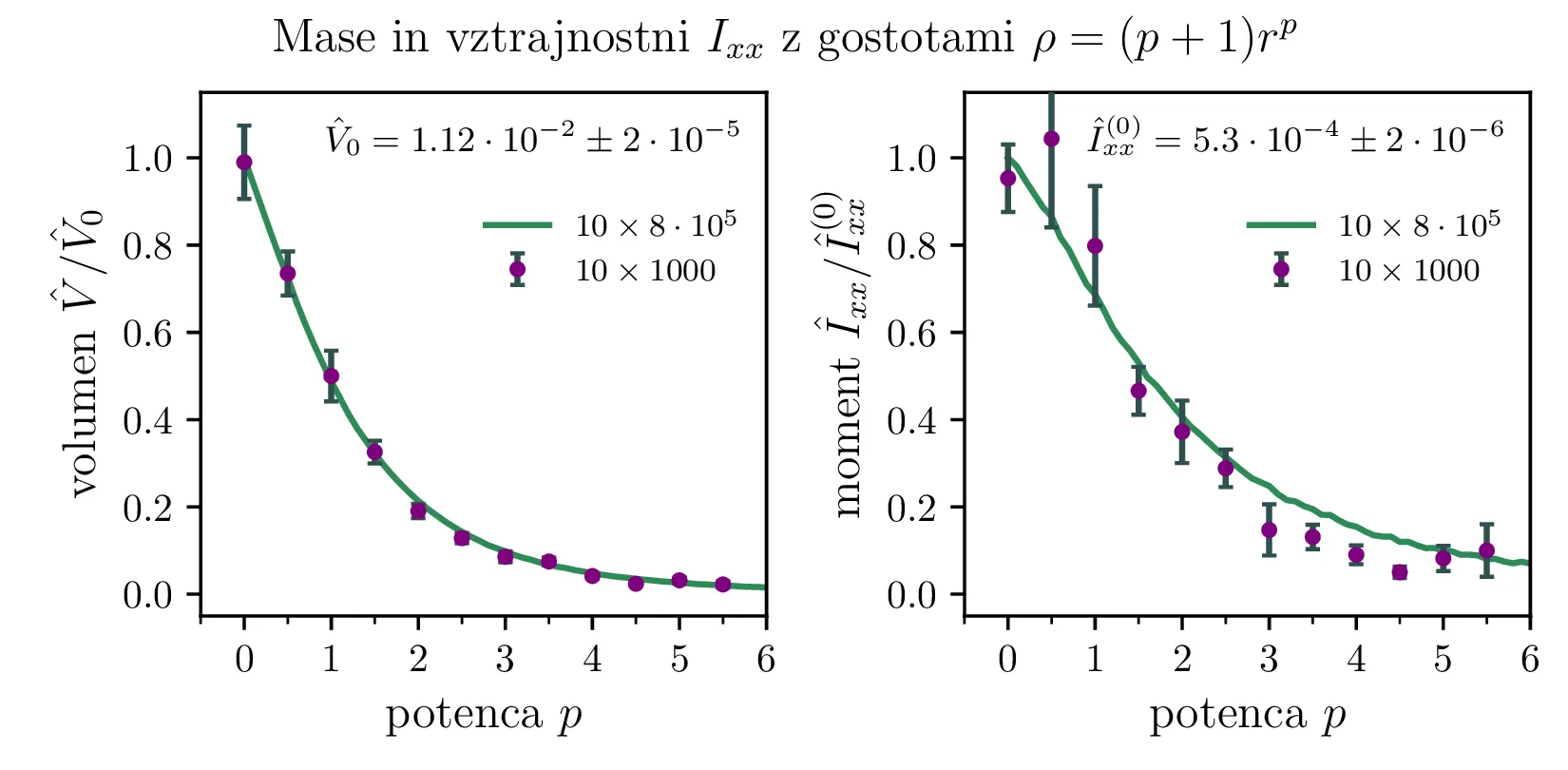
Izračunati želimo volumen telesa \[\sqrt{|x|} + \sqrt{|y|} + \sqrt{|z|} < 1,\] konkretno nas bo zanimala \(1/8\) tega volumna, torej volumen v \(111\) oktantu. Volumen enega takega oktanta je \[V = \int_0^1 \int_0^{(1 - \sqrt{y})^2} \big(1 - \sqrt{x} - \sqrt{y}\big)^2 \,\mathrm{d}x \,\mathrm{d}y = \frac{1}{90}.\] Na sliki 3 vidimo integracijo \(100\times10^6\), t. j. ansambel 100 integracij po \(10^6\) korakov. Tako izračunamo za volumen enega oktanta \[\hat{V} = 1.111 \cdot 10^{-2} \pm 10^{-7},\] kar znotraj \(\mathrm{SE}\) napake ustrezno in se ujema z \(V = 1/90\), dejansko odstopanje je \(3\cdot10^{-6}\). Samo integracijo lahko nekoliko posplošimo z uvedbo gostote \begin{equation}\rho = (p+1) r^{p}, \label{eq:rho}\end{equation}
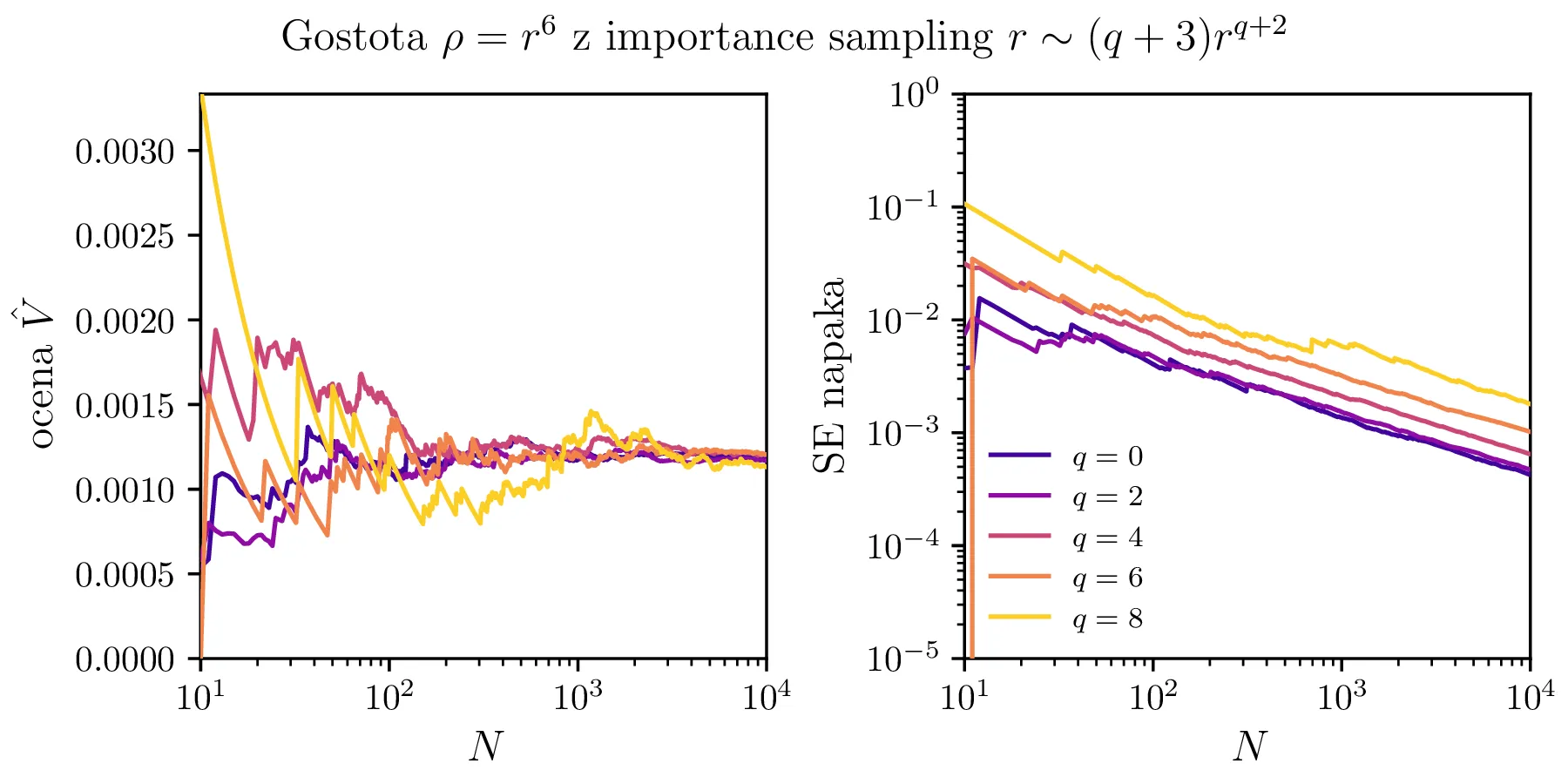
s katero moramo pri vsoti obtežiti posamezne točke v integraciji. Na sliki 4 levo vidimo odvisnost volumna od potence v gostoti (2). Poleg mase lahko izračunamo tudi vztrajnostni moment \[I_{xx} = \frac{1}{8} \iiint_{\sqrt{|x|} + \sqrt{|y|} + \sqrt{|z|} < 1} \rho(x, y, z) (y^2 + z^2) \,\mathrm{d}x \,\mathrm{d}y \,\mathrm{d}z.\] Tako definiran vztrajnostni moment okoli \(x\)-osi vidimo na sliki 4, izračunan za različne eksponente \(p\). Vidimo, da je račun take količine precej bolj zašumljen kot izračun mase.
Ker gostota našega telesa (2) zdaj narašča z \(r\), se nam porodi misel, da bi integral gosteje vzorčili pri večjih \(r\). To lahko realiziramo s t. i. pomembnostnim vzorčenjem (ang. Importance sampling), kjer vzorce porazdelimo neenakomerno, sorazmerno s tem pa jih tam kjer je vzorčenje redkejše, močneje obtežimo. Zahtevamo, da je ta porazdelitev neničelna povsod,kjer je \(F(X) \neq 0\). Nato MC integracija neke količine \(F(X)\) za naključno spremenljivko \(X \sim g\) poteka kot
Generiraj vzorce iz nove porazdelitve \(Y_i \sim h\) za \(i = 1, 2, \dots, N\).
Izračunaj pričakovano vrednost \(\langle F(X) \rangle\) kot obteženo vsoto \[\langle F \rangle \approx \frac{1}{N} \sum_{i = 0}^N w(Y_i) F(Y_i)\] pri čemer so vzorci iz nove porazdelitve \(h\) obteženi kot \[w(Y_i) = \frac{g(Y_i)}{h(Y_i)}.\]
Ko generiramo naključno porazdeljene točke v volumnu enotske krogle, izberemo za radij \[r \sim 3 r^2\] Da naredimo MC integracijo gostejšo pri večjih \(r\) (da proti bolj zunanjim lupinam gostota raste kot \(r^q\)), po novem žrebamo iz porazdelitve \[r \sim (q+3) r^{q+2} = \sqrt[q+2]{U(0, 1)}.\]
Izračunati želimo verjetnost za pobeg \(\gamma\)-žarkov iz krogle, v kateri nastajajo na naključnih mestih, homogeno po volumnu. V snovi, iz katere je narejena krogla, se absorbirajo po eksponentni atenuaciji \(e^{-\lambda x}\), pri čemer je parameter povezan s povprečno prosto potjo fotona v snovi \[\frac{1}{\lambda} = \langle \ell \rangle.\]
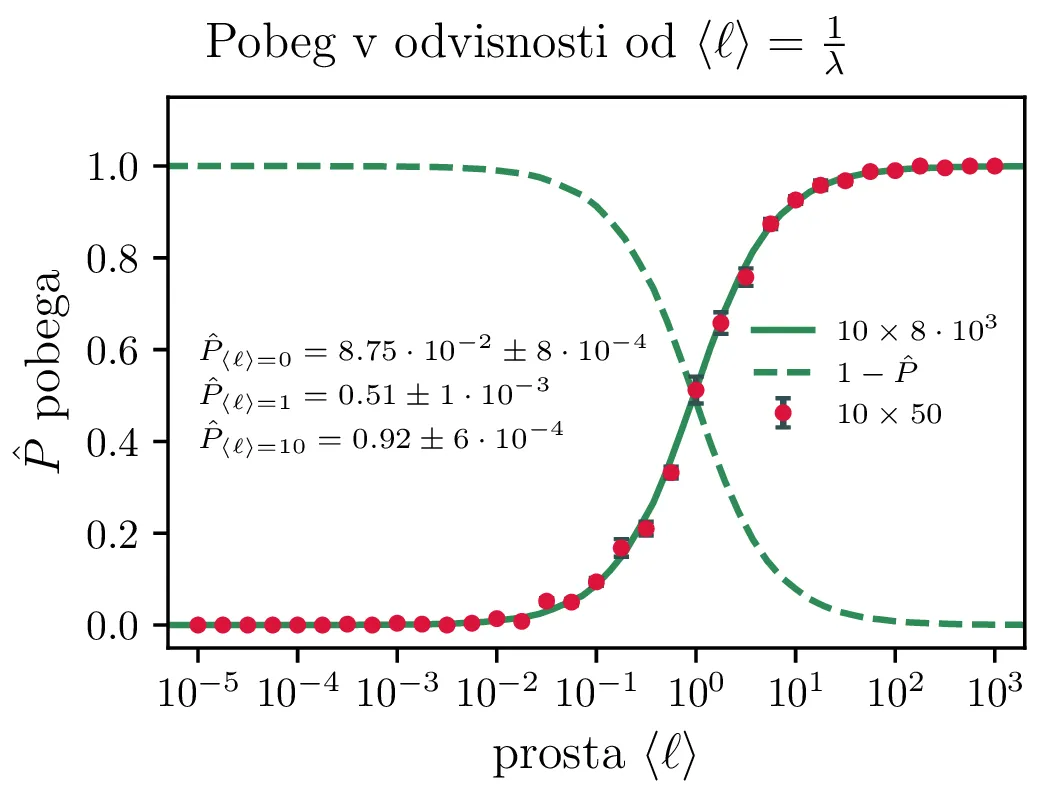
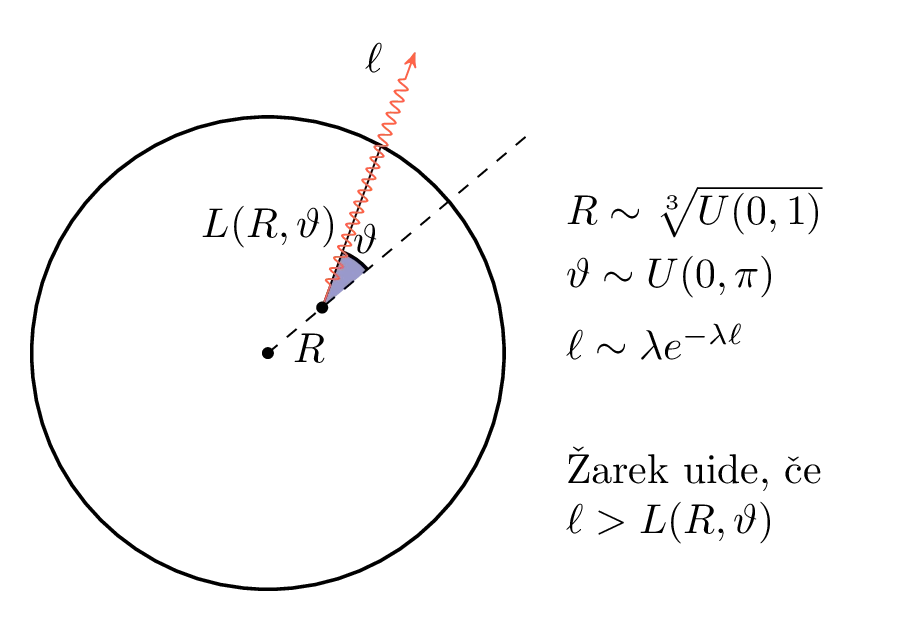
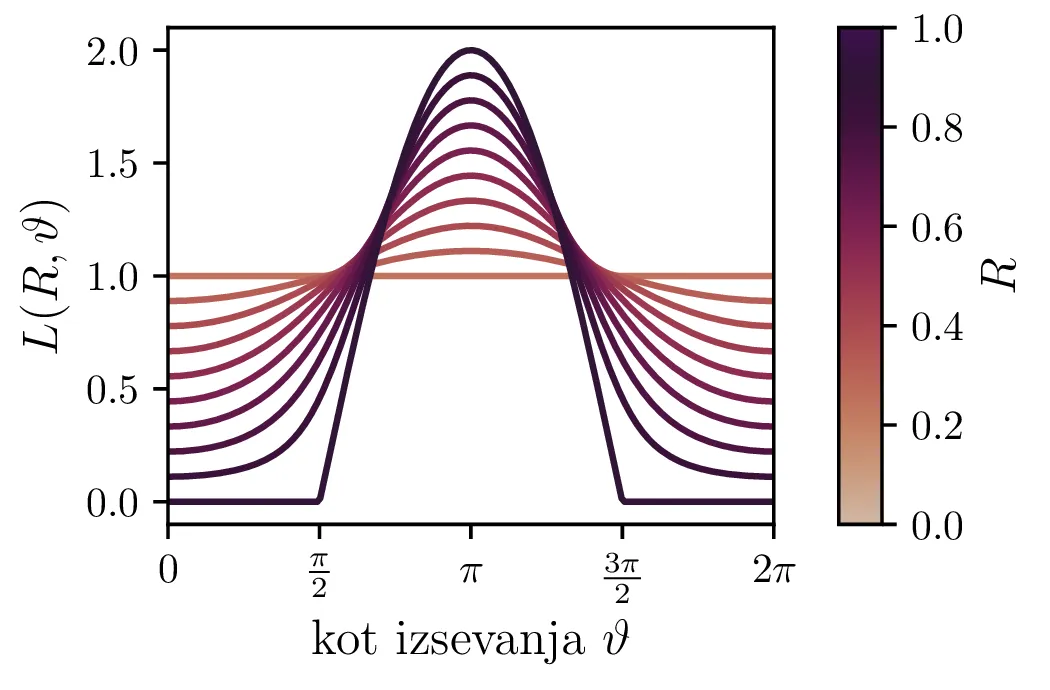
Ker bomo za kroglo izbrali enotsko kroglo, je brezdimenzijska tudi prosta pot \(\langle \ell \rangle\) in torej predstavlja razmerje med dejansko povprečno prosto potjo in radijem krogle. Ker je problem sferično simetričen, ga lahko gledamo le na enem radialnemu poltraku iz središča sfere (glej skico 6 levo). Na takem poltraku izberemo nek \(R \sim \sqrt[3]{U(0, 1)}\), nato pa še kot \(\vartheta \sim U(0, \pi)\), saj je nastajanje izotropno (vzamemo lahko le \([0, \pi]\), saj je druga polovica \([0, -\pi]\) povsem enakovredna). Mehanizem eksponentne absorbcije tedaj modeliramo tako, da za "dogodke" oz. fotone žrebamo neko "realizirano pot" \(\ell \sim \lambda e^{-\lambda x}\), nato pa preverimo, če je \(\ell\) dovoljšen, da foton uide iz krogle, če pot začne na poltraku pri \(r = R\) in potuje v smer \(\vartheta\) glede na izbrani poltrak. Če za tak poltrak vzamemo \(x\)-os, je potovanje izsevanega fotona omejeno na žarek \[\mathbf{r} = (R + S \cos\vartheta, S \sin\vartheta, 0), \quad S \in \mathbb{R}^+,\] pri čemer je \(S\) pot fotona po žarku v smeri, v katero je bil izsevan. Razdalja, ki jo mora prepotovati, da zapusti kroglo (razdalja do površine) je tedaj rešitev kvadratne enačbe \[R^2 + 2RS \cos\vartheta + S^2 = 1,\] in ustrezna pozitivna rešitev je razdalja do površine krogle \begin{equation}L(R, \vartheta) = -R \cos(\vartheta) + \sqrt{ \frac{2 - R^2 + R^2 \cos(2\vartheta)}{2} }. \label{eq:L}\end{equation} To odvisnost \(L(R, \vartheta)\) lahko vidimo na sliki 6 desno. Zdaj nam ostane le žrebanje točk \((R, \vartheta, \ell)\) in preverjanje \(\ell > L(R, \vartheta)\). Delež dogodkov, v katerih ta neenakost drži, se pri integraciji približuje verjetnosti za pobeg iz krogle. Tako izračunane verjetnosti za pobeg vidimo na sliki 7.
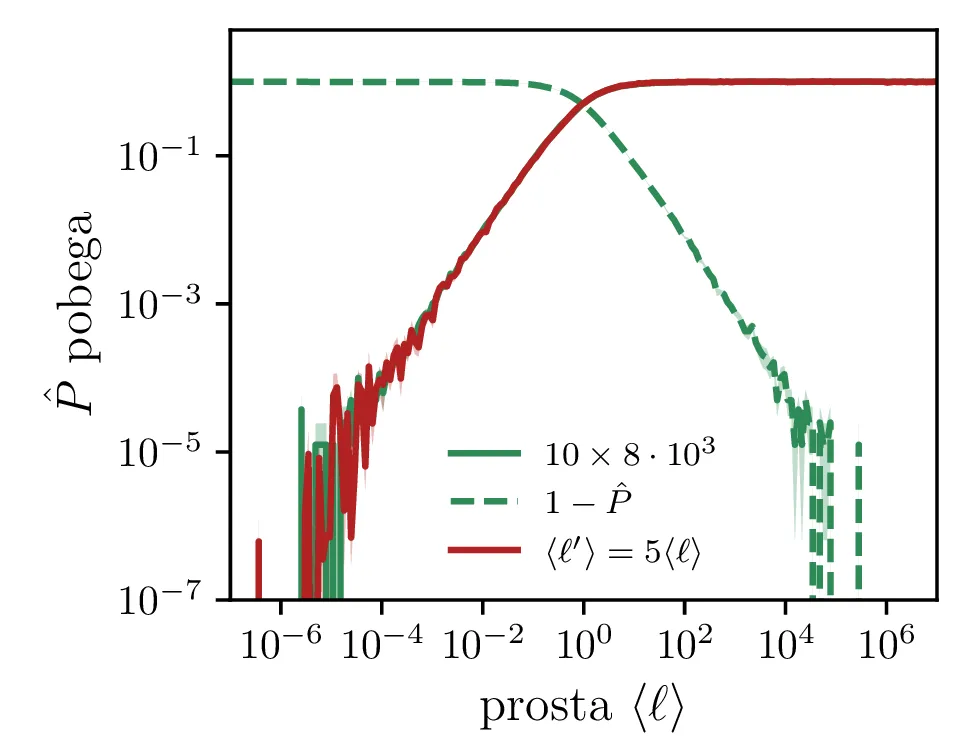
Kot vidimo na sliki 8 levo, je MC integracija relativno nenatančna za zelo majhne ali zelo velike \(\langle \ell \rangle\). Tedaj je med končnim vzorcev dogodkov zelo malo dogodkov, kjer foton pobegne in statistični šum postane znaten. To sem poskusil rešiti tako, da sem realizirane poti \(\ell\) dejansko žrebal po porazdelitvi \(\sim \lambda' e^{-\lambda' x}\) za prosto pot \(\frac{1}{\lambda'} = \langle \ell' \rangle\), kjer smo za \(\langle \ell' \rangle\) izbrali 5-kratnik dejanske proste poti, za katero smo računali verjetnost pobega. Kot je vidno in opisano na sliki 8 ta procedura ni delovala, napaka se je kvečjemu poslabšala.
Poleg povsem naključne MC metode z naključnimi spremenljivkami \((R, \vartheta, \ell)\) sem poskusil tudi hibridno metodo, kjer vzorci \(\vartheta\) niso zares naključni, temveč so enakomerno in ne-naključno porazdeljeni po \([0, \pi]\). Kot vidimo na sliki 8 desno, je tudi taka metoda slabša od navadne MC integracije.
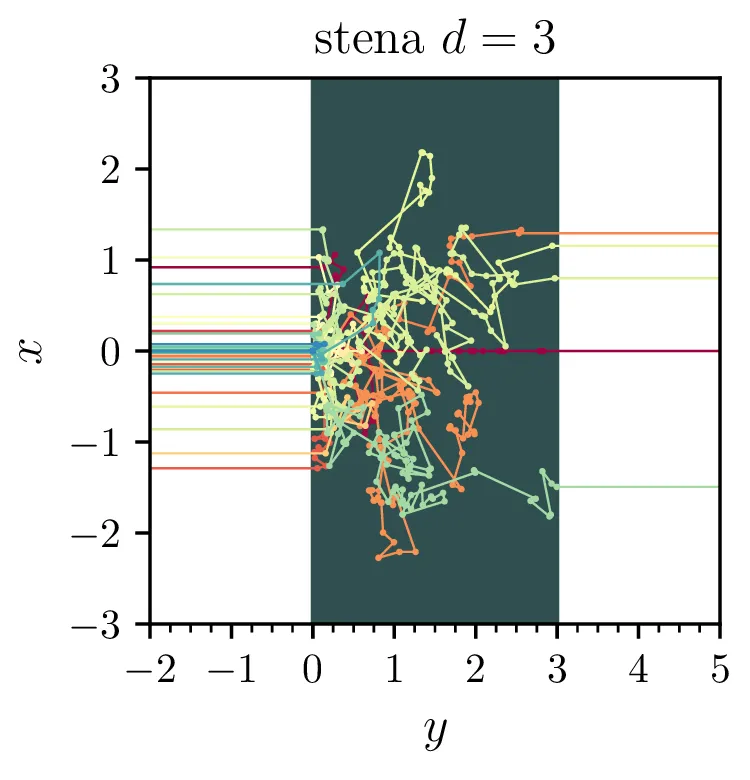
Obravnavamo nevtronski reflektor debeline \(d\), za katerega želimo računati verjetnost prepustnosti \(T\) in verjetnost odboja \(R\). Model je invarianten na sočasno skaliranje povprečne proste poti \(\langle \ell \rangle\) in debeline reflektorja. Zato bomo pri simulacijah nastavili \(d\) na 1 in prosto pot \(\langle \ell \rangle = \frac{1}{\lambda}\) dejansko razumeli kot razmerje proste poti in debeline reflektorja.
Model bomo z MC integracijo simulirali kot ansamble \(M\times N\) za naključne hode \(N\) delcev. Glede na dimenzijo, v kateri bomo problem reševali, bomo položaje nevtronov po vstopu v reflektor posodabljali sledeče
1-dimenzionalni model, kjer vsak korak naključno izberemo znak \(\mathcal{S} \in \{-1, 1\}\) in korak \(\ell \sim \lambda e^{-\lambda x}\), nato pa položaj korakamo kot \(x_{t + \Delta} = x_t + \ell \mathcal{S}\). Zagotovimo, da je prvi \(\mathcal{S}_0 = 1\).
2-dimenzionalni model, kjer vsak korak naključno izberemo kot \(\phi \in U(0, 2\pi)\) in korak \(\ell \sim \lambda e^{-\lambda x}\), nato pa položaj korakamo kot \(x_{t + \Delta} = x_t + \ell \cos(\phi)\), po potrebi pa še \(y_{t + \Delta} = y_t + \ell \sin(\phi)\).
3-dimenzionalni model, kjer vsak korak naključno izberemo kot \(\vartheta \in \arccos\big( U(-1, 1) \big)\) in korak \(\ell \sim \lambda e^{-\lambda x}\), nato pa položaj korakamo kot \(x_{t + \Delta} = x_t + \ell \cos(\vartheta)\), po potrebi pa še radij \(\rho_{t + \Delta} = \rho_t + \ell \sin(\vartheta)\).
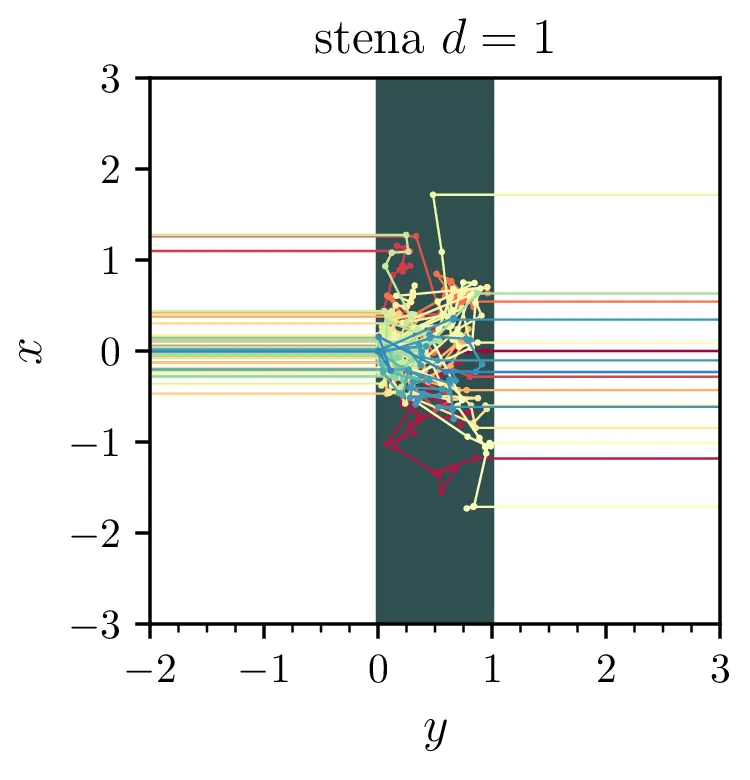
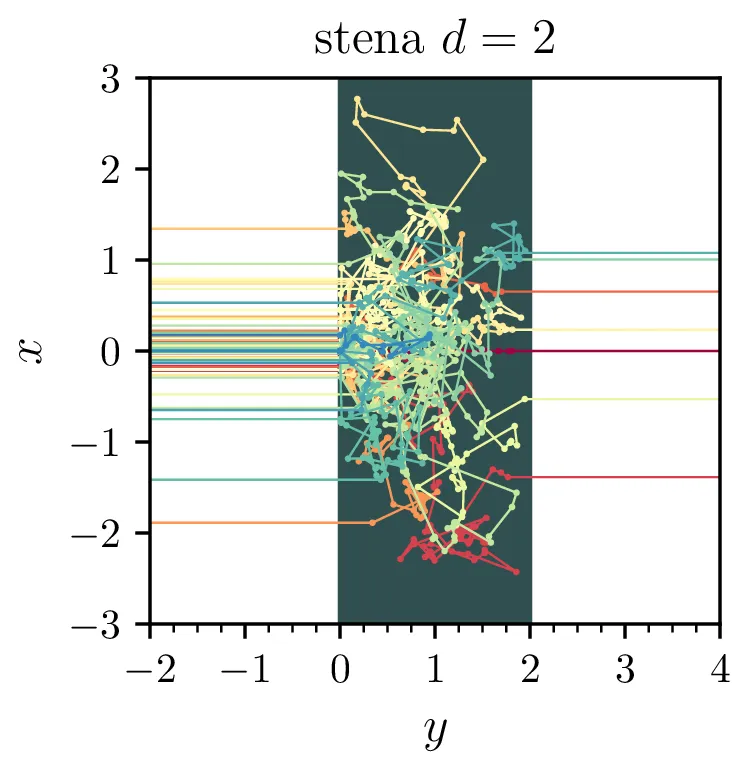
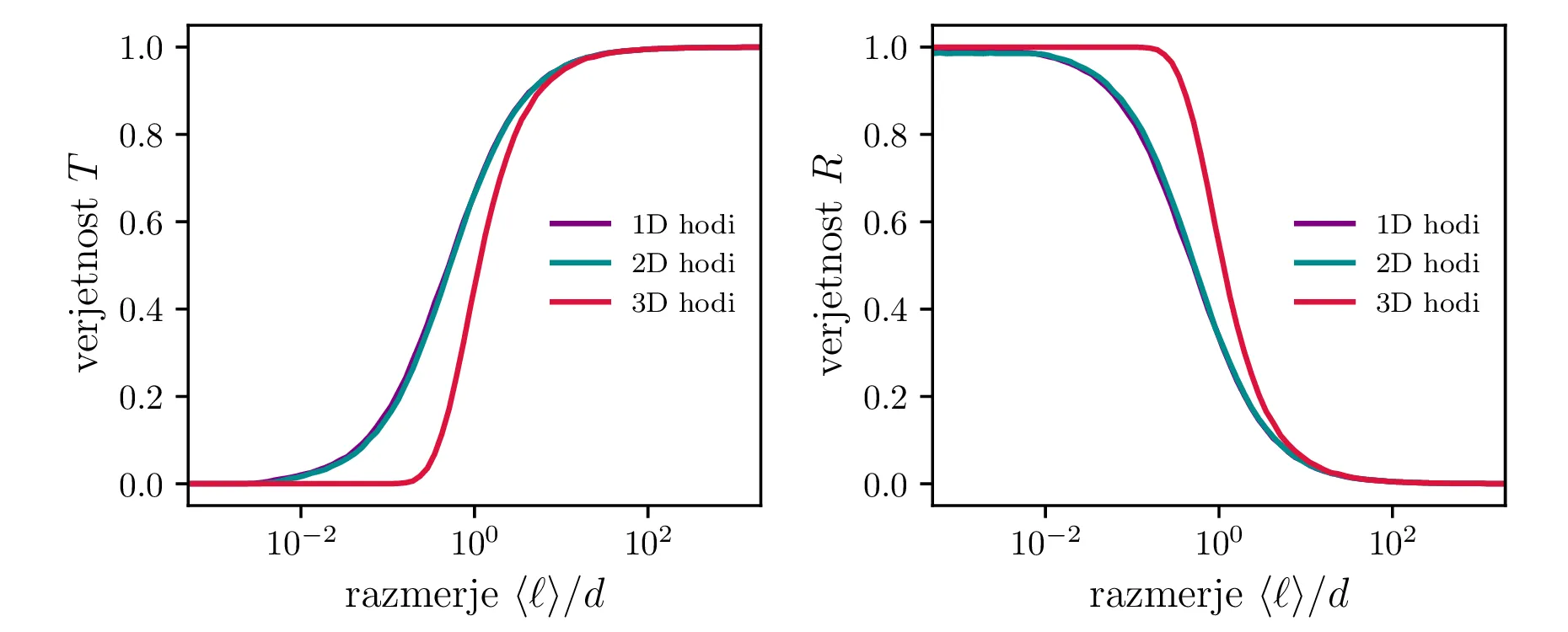
Primere posameznih realizacij za \(N = 100\) delcev v 2-dimenzijskem modelu vidimo na sliki 9. Že takoj vidimo, da je debelejši reflektor bolj odbojen. Modele v različnih številih dimenzij lahko neposredno primerjamo (slika 11) in opazimo, da se 1D in 2D izotropni model precej dobro ujemata, 3D izotropni model pa ima drugačno značilno obliko \(T\) in \(R\).
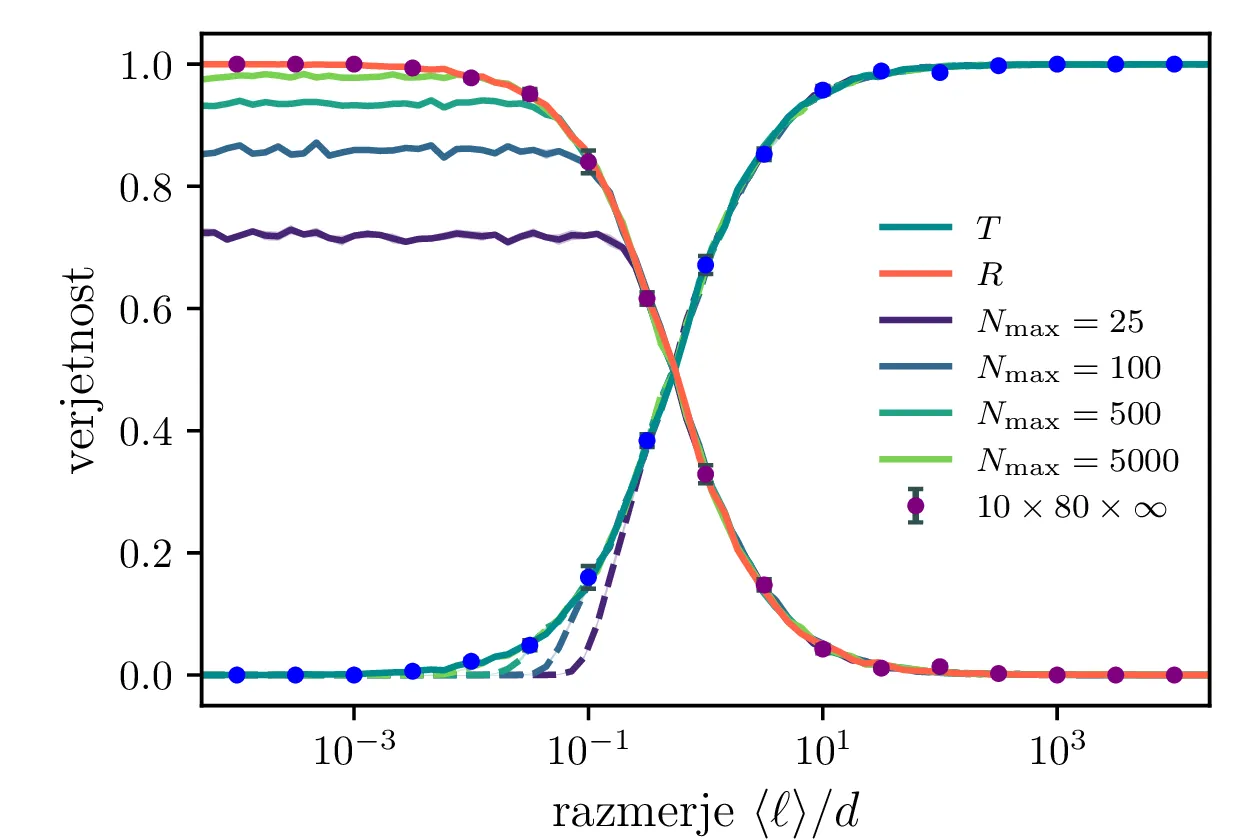
Na sliki 10 sta narisani \(T\) in \(R\) za 2-dimenzijski model. Razvidna je sigmoidna oblika, kjer je za majhne proste poti \(\langle \ell \rangle\) značilna visoka odbojnost \(R \sim 1\) in majhna prepustnost \(T \sim 0\), ravno obratno pa pri velikih \(\langle \ell \rangle\). Te pričakovane obliki sta nekoliko zmoteni, če pri korakanju uvedemo maksimalno število korakov \(N_\mathrm{max}\), kot nekakšno časovno omejitev. Tedaj je za majhne \(\langle \ell \rangle\) odbojnost \(R < 1\), hkrati pa je propustnost še vedno \(T \sim 0\). Tako imamo na videz nesmiselno situacijo \[T + R < 1,\] ki pa je pravzaprav posledica tega, da znotraj omejitve števila korakov nevtroni sploh ne zapustijo volumna reflektorja. To sicer ni primerno za simulacijo stacionarnega stanja, lahko pa bi postalo smiselno za modeliranje nekega časovno zamejenega procesa.
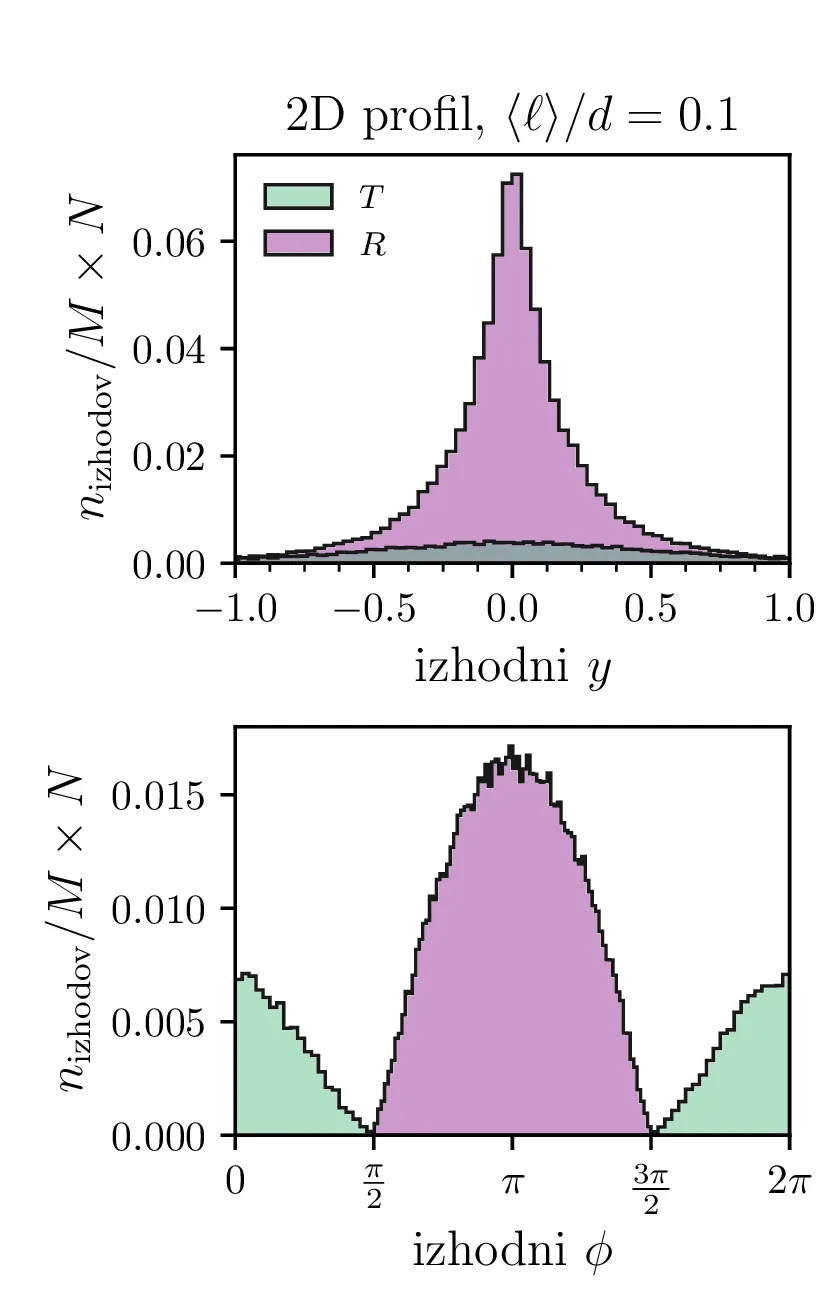
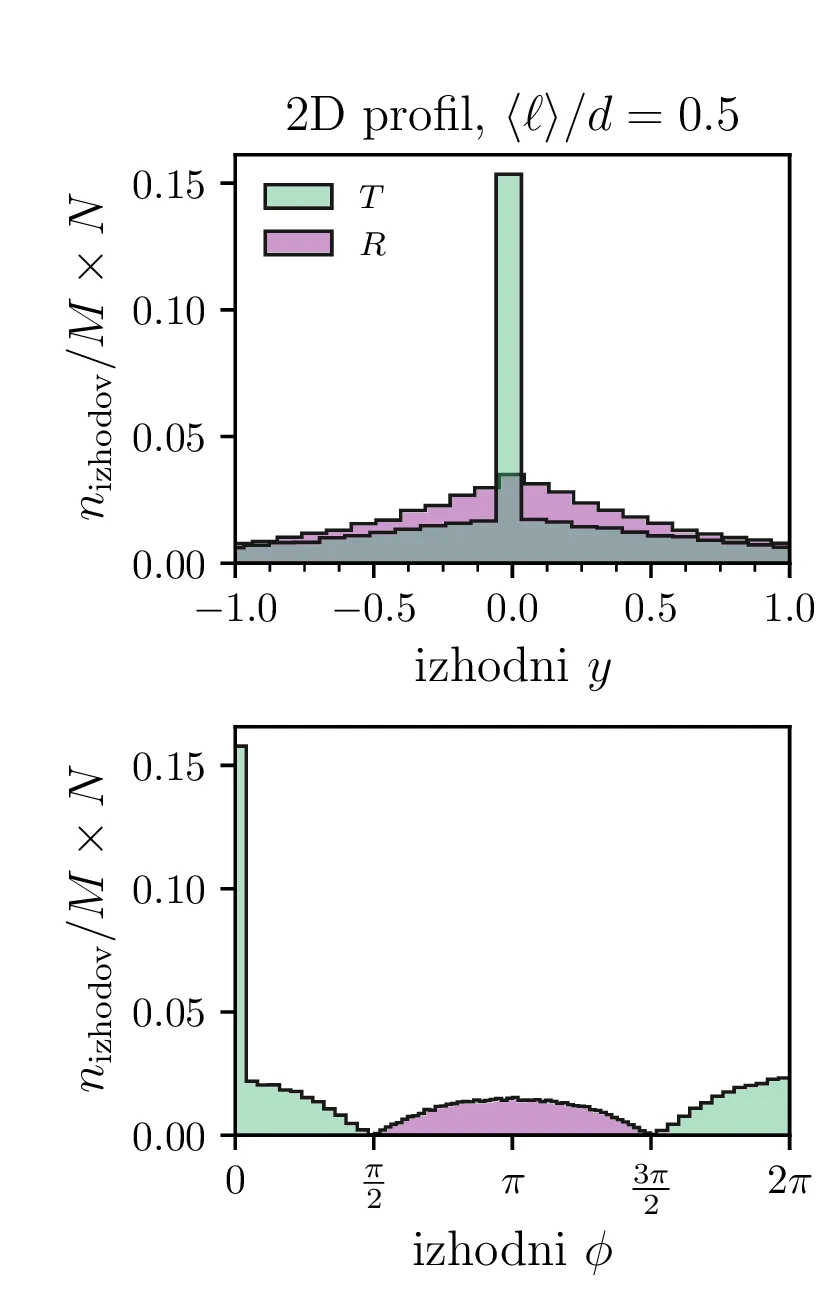
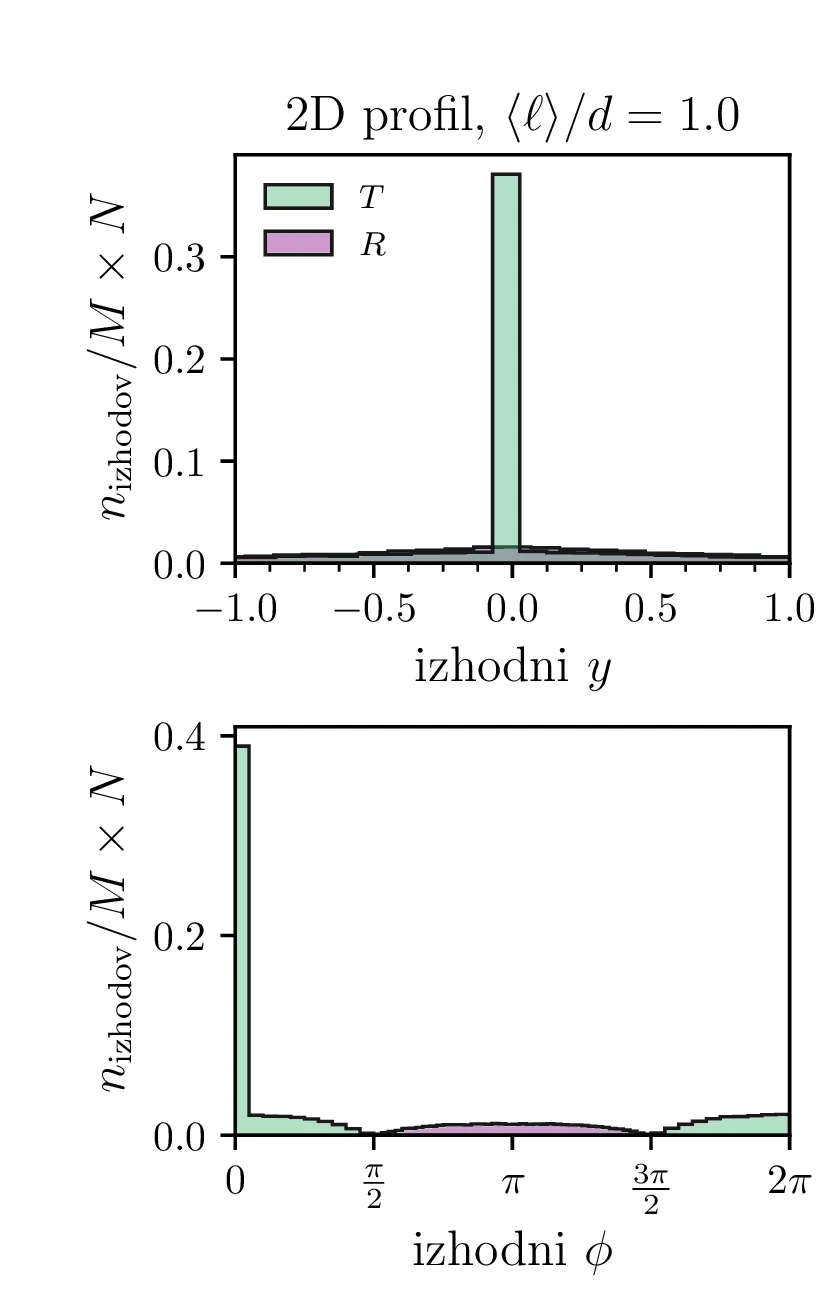
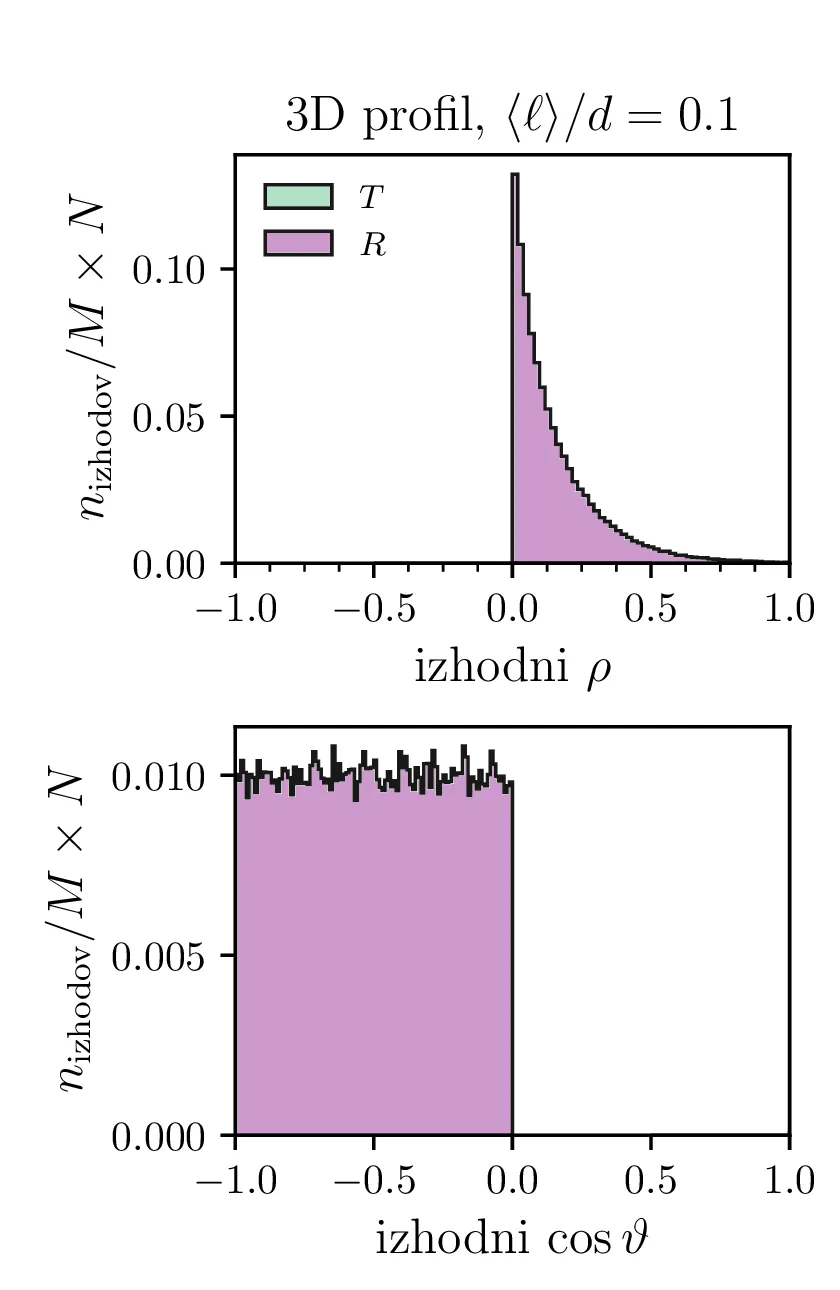
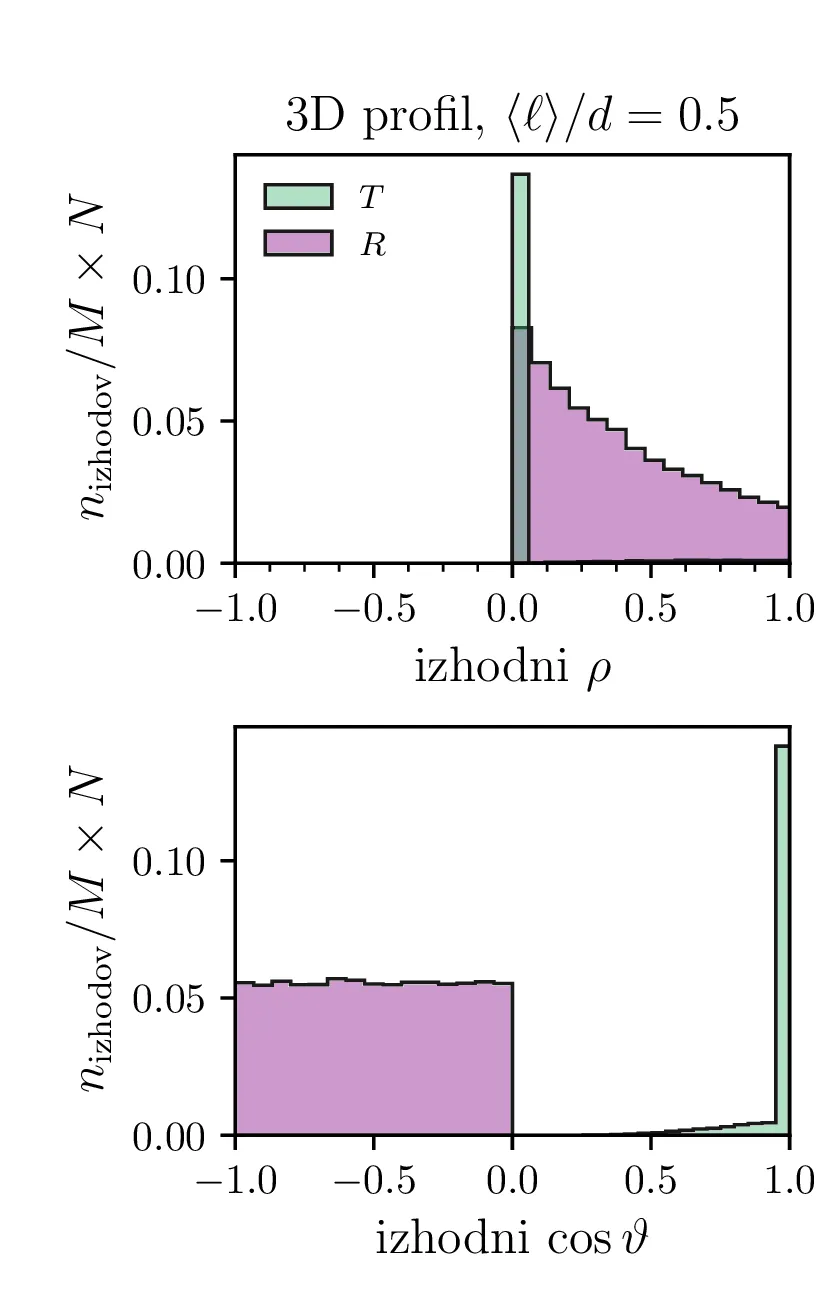
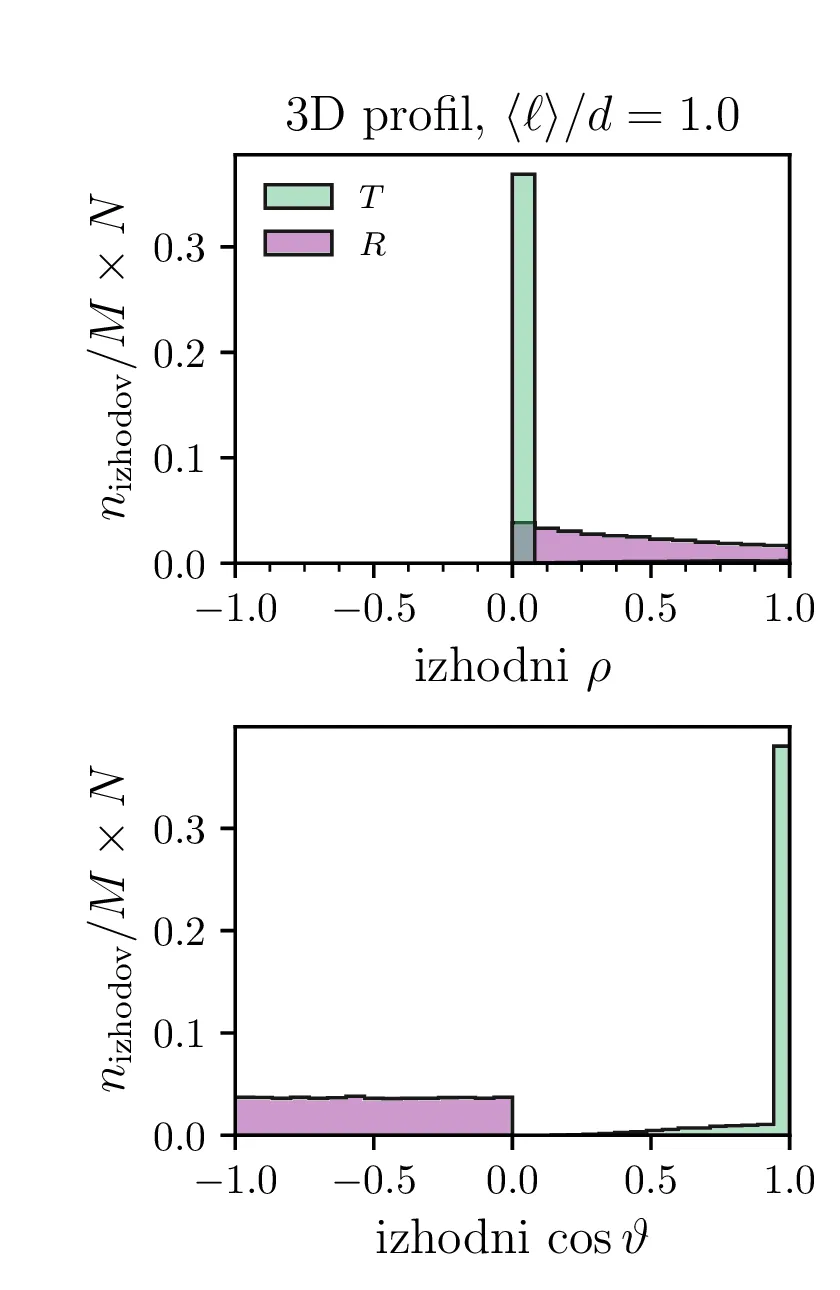
Pogledamo si lahko še nekaj porazdelitev nevtronov. Sicer nas bo za 2-dimenzijski model zanimala porazdelitev po koordinati \(y\) in po kotu \(\phi\), pod katerim potuje nevtron ko zapusti reflektor na levi (odbit nevtron) ali desni strani (prepuščen nevtron). Take profile za nekaj različnih razmerij \(\langle \ell \rangle\) vidimo na sliki 12. Tako kot v 2D modelu gledamo izhodna \(y\) in \(\phi\), gledamo v 3D modelu izhodno radialno cilindrično koordinato \(\rho\) in kot \(\cos\vartheta\). Profile po \(\rho\) in \(\cos\vartheta\) narišemo na sliki 13.
Na podlagi teh profilov lahko 2D in 3D model primerjamo. Za oba modela npr. velja, da tanek reflektor z visoko prepustnostjo \(T\) prepusti zelo usmerjen curek (glej 12 in 13). A modela se razlikujeta po tem, kako učinkovit je tanjši reflektor (v 3D modelu je že precej tanjši reflektor zelo dober in ima \(R \sim 1\)). Za 3D model pa je značilno še to, da odbiti nevtroni po odboju iz reflektorja izhajajo izotropno (glej slike 13 spodaj).